
Обратились за помощью изготовить контроллер управления мотор-колесами тележки для перевозки грузов.
В процессе была выполнена разработка контроллера, его изготовление, написание операционной системы, тестирование на макете и на конечном изделии.

Задание кратко:
- тележка должна двигаться вперед и назад;
- иметь электронный тормоз;
- мотор-колеса от электросамоката или гироскутера;
- автоматическая диагностика неисправностей и защита (чтобы тележка сама не убежала за горизонт…
Мотор-колеса заказчик купил сам от электросамоката, соответственно и контроллер должен быть для них (рис. ниже).
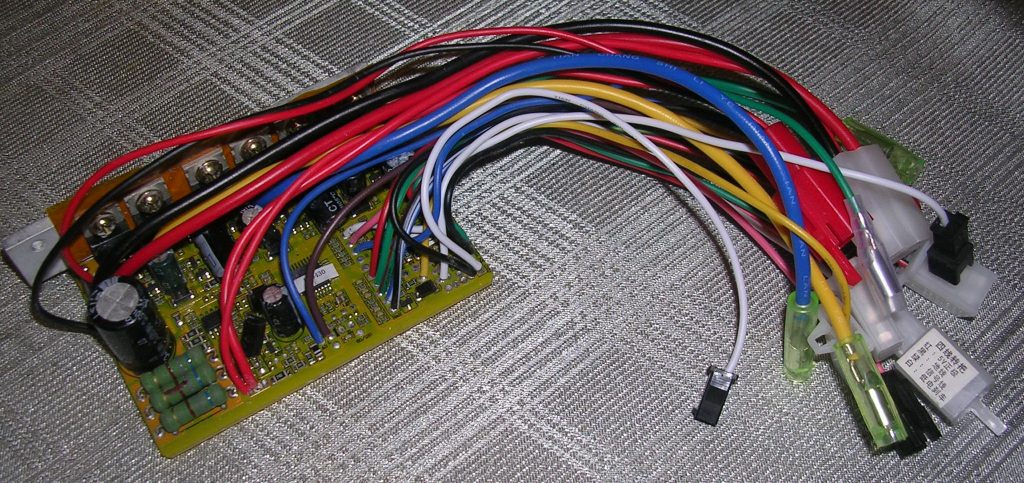
Контроллер в известных кругах перекопан вдоль и поперек, поэтому спасибо всем, кто публиковал материалы в общий доступ. Единого источника не было, поэтому не упоминаю, кто внес вклад.
Важно что на плате контроллера имеются управляющие контакты, не выведенные наружу. Поэтому удаляем все лишнее и распаиваем все недостающее. Попутно отключаем контроль уровня батареи, АКБ будем контроллировать своим контроллером.
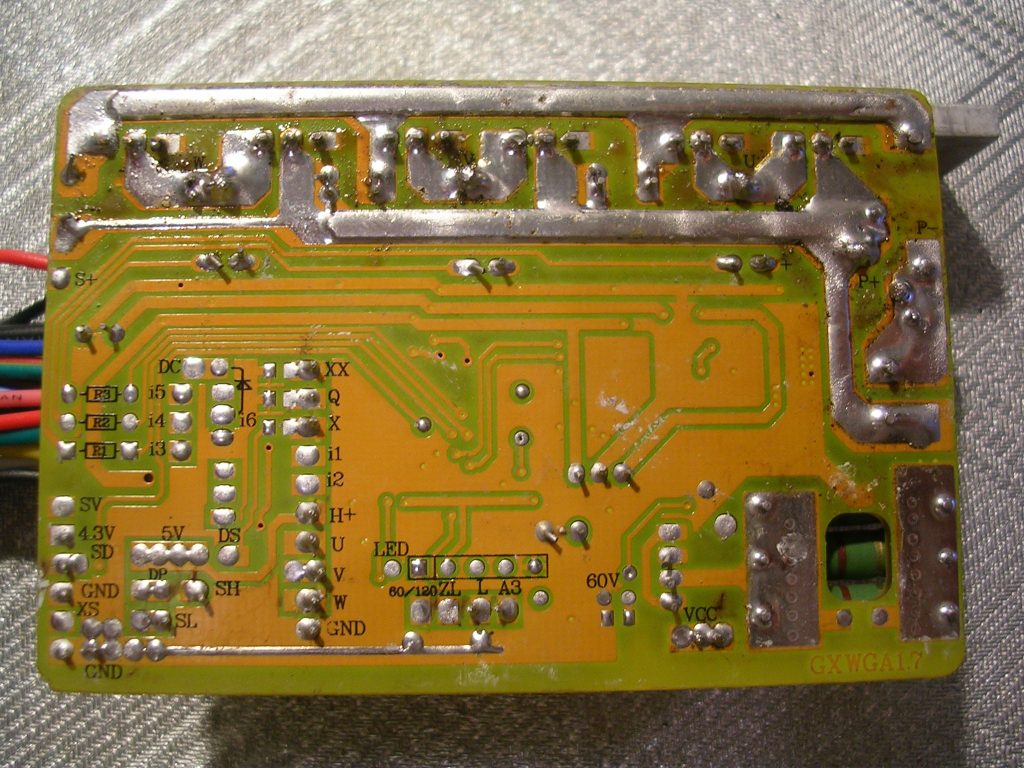
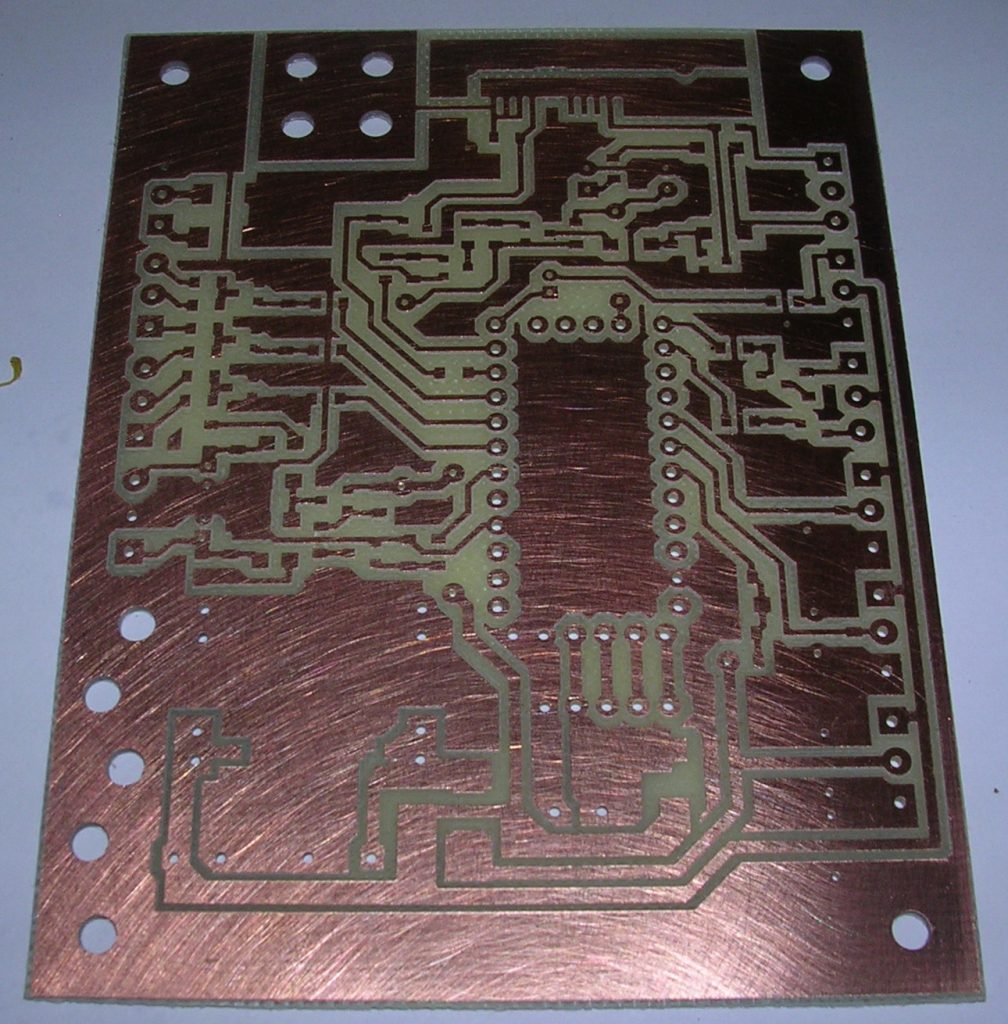
Плата разработанного контроллера вид снизу.
Суть работы контроллера:
- диагностика при включении. Проверяется напряжение батареи, обрыв проводов управления движением. В случае неисправности подаются условные световые и звуковые сигналы, после чего устройство самостоятельно отключается;
- считывание параметров с двух ручек управления (2 курка от электросамоката) и принятие решения о дальнейших действиях (движение вперед/назад, тормоз, нейтраль).

Работа:
Правый джойстик — движение вперед.
Левый джойстик — движение назад.
Оба джойстика — тормоз.
Трехпозиционный переключатель:
- I — пониженая скорость;
- II — максимальная скорость;
- среднее положение — средняя скорость.
Дополнительно изготовлена автоматическая подставка. Остановился, подставка выдвинулась и можно оставить тележку стоять без поддержки руками.
Дело за покраской.


